3.1 pidブロック線図 図4.2 i-pd制御シミュレーション結果 4.2 2自由度制御 2自由度制御[2]とは,従来のpid制御に簡単な補償装置を 組み込むことにより得ることのできる制御方式のことである.今 回は代表的な形のひとつである,フィードバック型を使用する. この2自由度制御. 倒立振子ブロック線図 k は極配置法により,解析ソフト「scilab」を用い て導出する.pid制御での安定化ゲインは既知なので, 極の目安も既知である.例として極を(8) 式とした. s = h ¡240+60i ¡240¡60i ¡2+0:4i.
くぼみ 熟考する 窒息させる pid 制御 ブロック 線 図
E1gs0x4naさん このブロック図は「速度ref と 速度fdbk」が書かれているので 速度制御ですね。この場合は mpcsp079さん の図で e は速度エラー、 その速度エラーを piコントローラーに入れた出力が dv/dt と書いている。 実際はね、これはトルク指令になります。何故ならば速度制御を するには負荷トルクに釣り合うトルク指令、つまり電流を与えなければ なら.
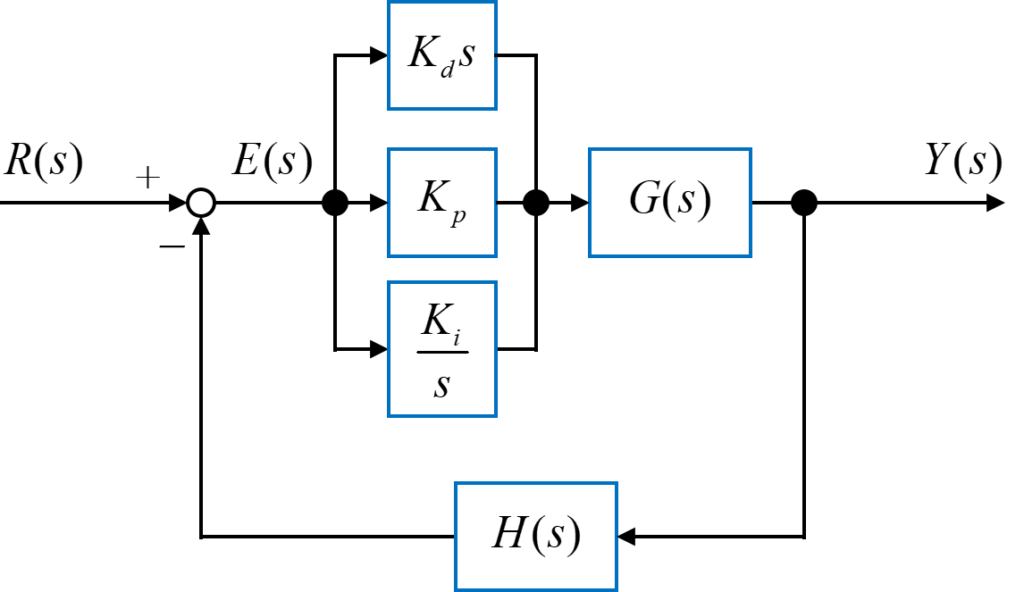
Pid 制御 ブロック 線 図. 図15は、τ=5、k i =2として、k d =10,k p =12としたときのpid制御の開ループ伝達関数のボード線図です。 図15 pi制御とpid制御のボード線図 比較のため、第8回の図4に示したpi制御の開ループ伝達関数のボード線図を一緒に載せています。 この図中では t :時間、 u :操作量、 r :目標値、 y :出力値、 e :偏差. その典型的な例が,本章で説明するpid制御である。 pid制御系のブロック図を図5.1 に示す。このように簡単な構造でありながら,けっこう強力で, プロセス制御などに広く普及し活用されている。実際,実用されている制御法式のなかでpid制 御は84%を占めるという報告もある1。 pid制御の歴史は古い。

Python ブロック 線 図
Pid ブロック 線 図
最高の画像 最高 Ever 一巡 伝達 関数

適応制御の基礎 Qiita
最高の画像 ユニーク フィードバック 制御 実例
1_3_cmt
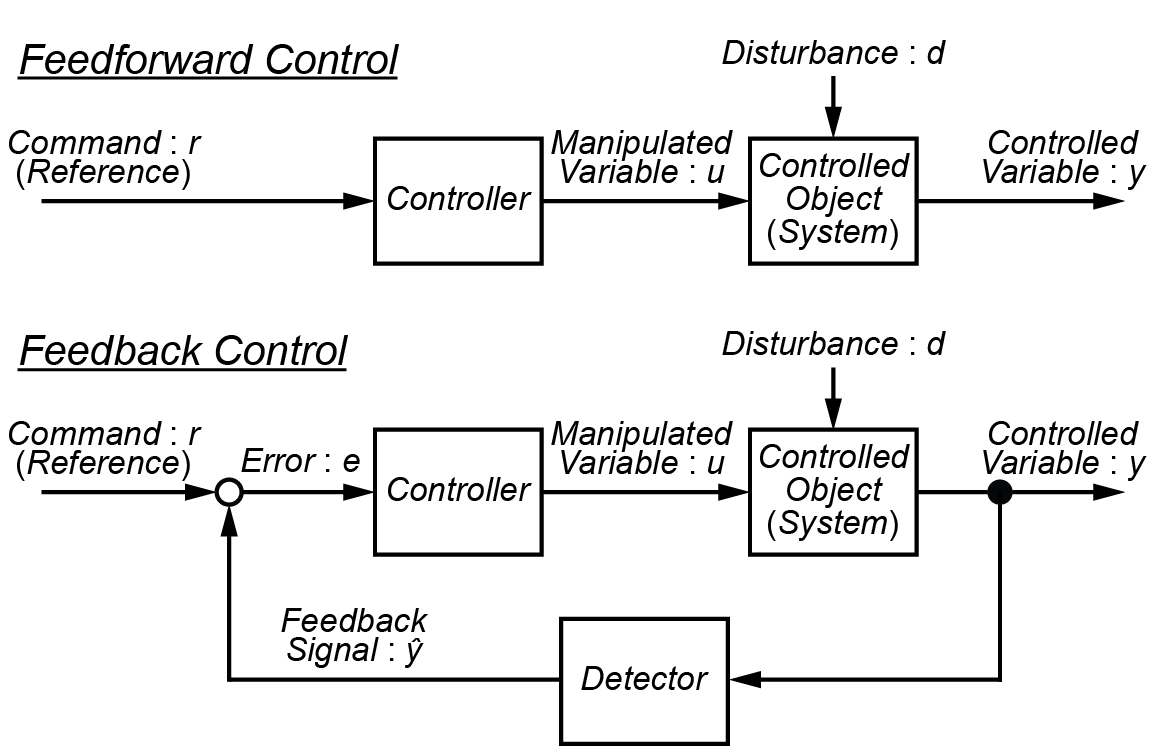
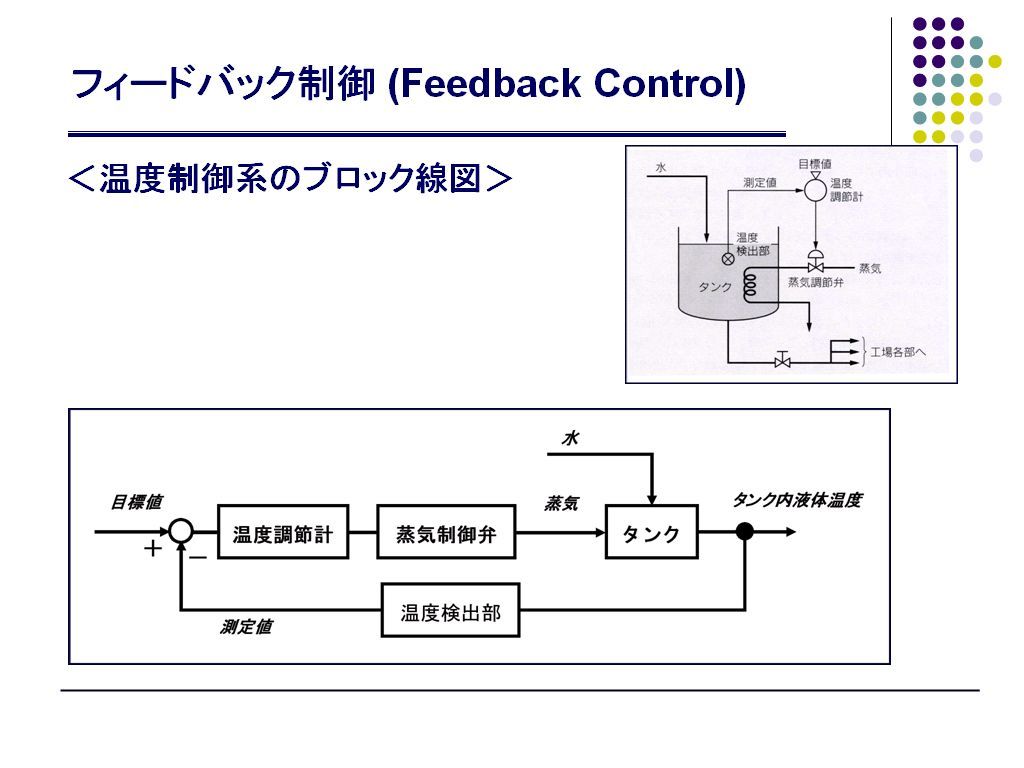
フィードフォワード制御とフィードバック制御でロボットを自由に制御しよう|Tajima Robotics

【制御工学】ブロック線図の等価変換。外乱含んだDCモータのモデル化とシミュレーション【Python】 LIFE
PX4プロジェクトの制御アルゴリズム解説 (mc_att_control) Qiita


{kind=link}