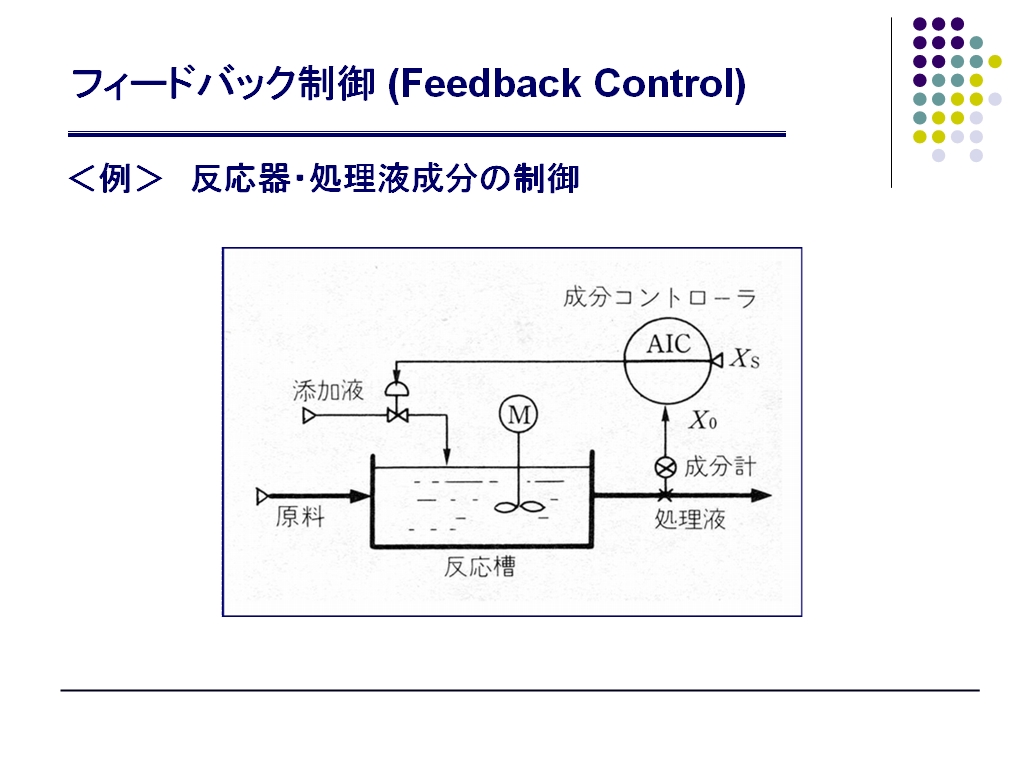
ソリューション:simulink pid controller ブロック i, p, pd, pi, pid を選択 (dは近似微分) 並列or 標準形式を選択 出力飽和制限の設定 アンチ・ワインドアップ機能 トラッキングモードによるバンプレス移行. Pid制御系のブロック図を図5.1 に示す。このように簡単な構造でありながら,けっこう強力で, プロセス制御などに広く普及し活用されている。実際,実用されている制御法式のなかでpid制 御は84%を占めるという報告もある1。 pid制御の歴史は古い。

Pid ブロック 線 図
しか し,両パラメータの間に誤差が存在すればpi 制御 に より偏差は抑制される。 本実験で用いた単相pwmインバータシステム をfig.2 に示す。iout の指令値の1周期を制御周期 50[µs]ごとにn 等分し,その1区間ts 内で線間電圧 vinv が ts 2.
Pi 制御 ブロック 線 図. (今回はpi制御を使用) 1.差分計算ブロックを配置 (math operations⇒sum) 3.pid制御ブロックを配置 (continuous⇒pid controller) 2.フィードバックループを作成 (右ボタンを押しながらドラックし、 信号線の分岐点を作成) 5.チューニング前 の応答を確認 伝達関数g(s) を持つ系のブロック線図 (1.5) 式はブロック線図(block diagram) によって図1.2 のように表される.s は微分演算 d/dt を表す記号(演算子(operator))であると解釈してもよ. 2 ベクトル制御ブロック図 ベクトル制御のブロック図を、図4-1に示します。 電流座標変換 uvw=>dq ipm/spm モータ 角速度&dq軸角度 演算 非干渉制御演算 dq軸電流制御 演算 電圧ベクトル制限 演算 vd* vq* iu iw id iq cnt wtdq wr vdc id* iq* id iq vdpi vqpi wr* wr mu* mv* mw* 空間.
7 アンチワインドアップ制御 ワインドアップ現象 アンチワインド アップ機能 >> sldemo_bumpless 8. 図4 pi制御のボード線図 いよいよpid制御の実践だ! それじゃあ、横風を受けるときの自動走行制御システムにpid制御をすると、開ループ伝達関数g o のボード線図がどうなるか. E1gs0x4naさん このブロック図は「速度ref と 速度fdbk」が書かれているので 速度制御ですね。この場合は mpcsp079さん の図で e は速度エラー、 その速度エラーを piコントローラーに入れた出力が dv/dt と書いている。 実際はね、これはトルク指令になります。何故ならば速度制御を するには負荷トルクに釣り合うトルク指令、つまり電流を与えなければ なら.
システム制御工学の演習問題解答

適応制御の基礎 Qiita
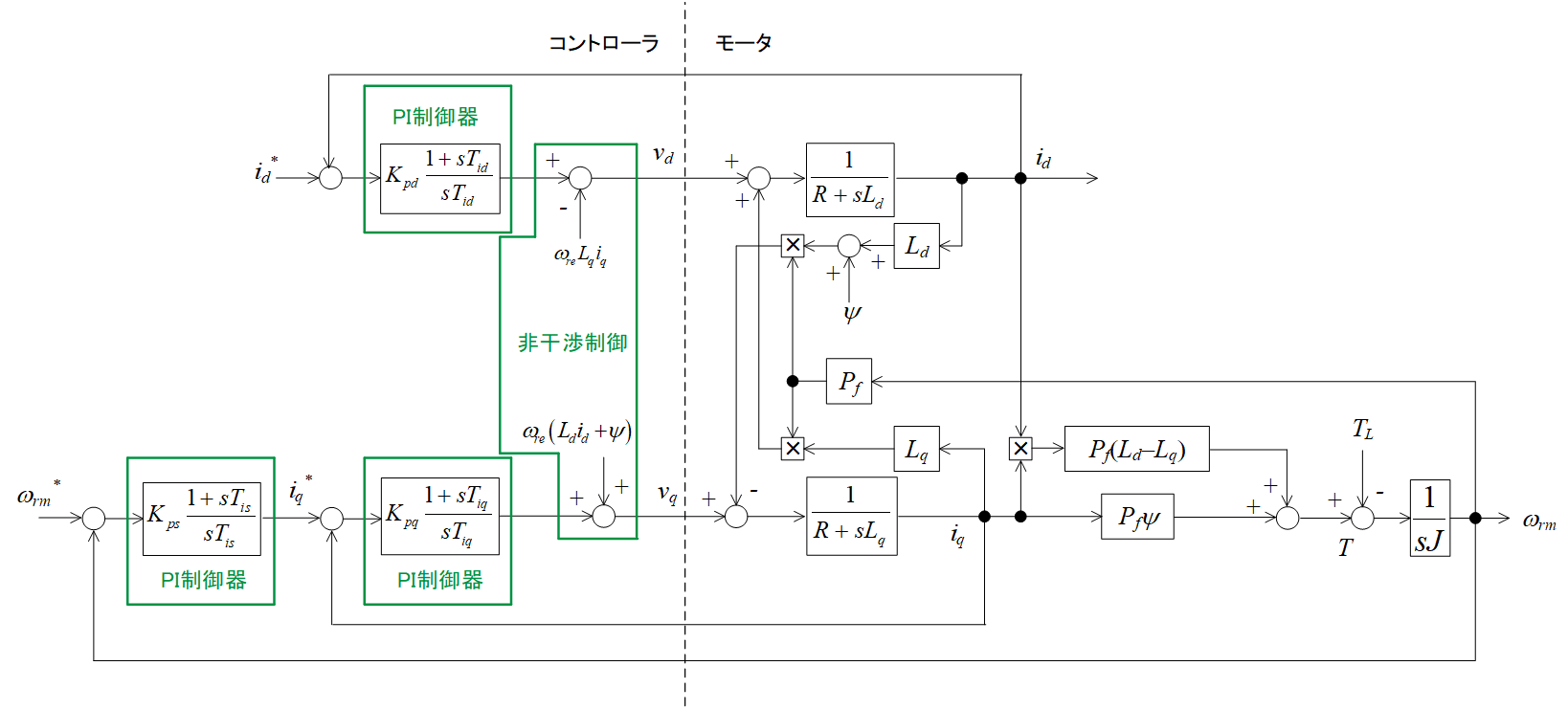
第6回:ベクトル制御のブロック図とPI制御器を用いた電流制御系の設計 長岡モーターディベロップメント株式会社
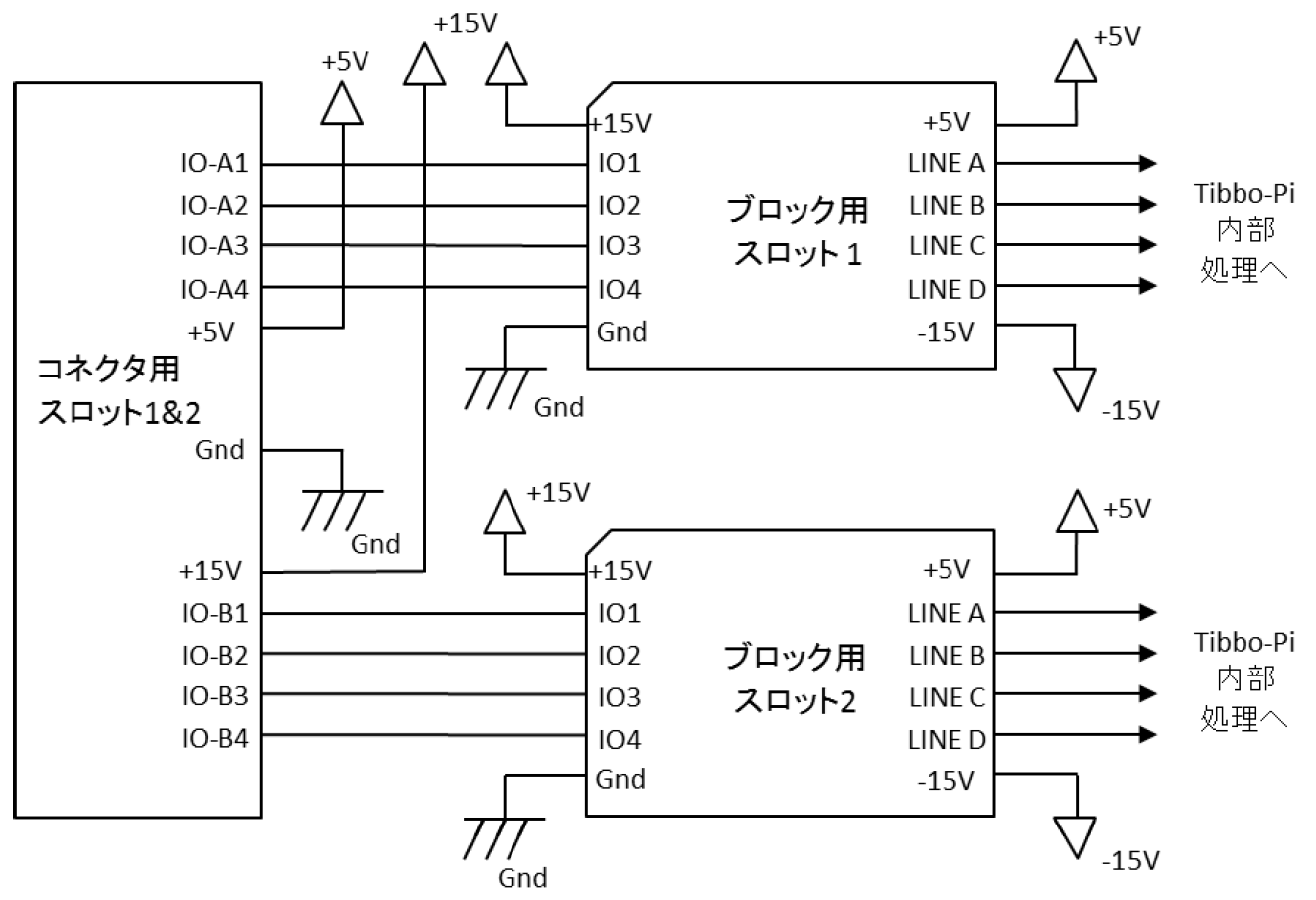
【現行2018年モデル】TibboPi P3 ベーシックキット TibboPi ティーボパイ

Automation Studio ブロック線図 PID制御 YouTube

53 絶縁型420mA信号変換器(16bitADC) TibboPi ティーボパイ
PSIMでのブロック線図によるゼロクロス検出方法 PWEL 一般社団法人 日本パワーエレクトロニクス協会

Part1
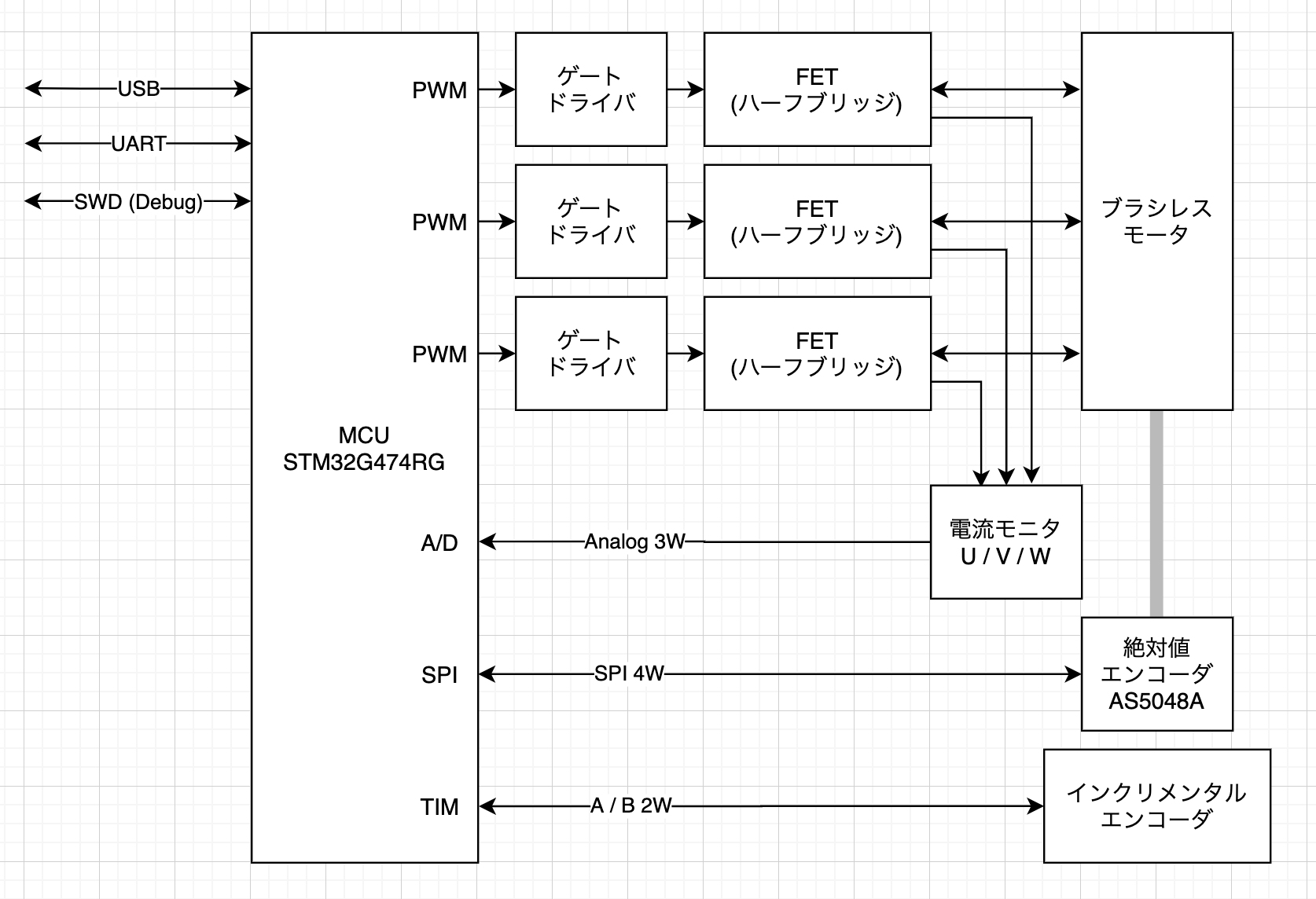
Brushless Motorをまわそう (1) cronos雑記

